Quadrique
Cet article est une ébauche concernant les mathématiques.
Vous pouvez partager vos connaissances en l’améliorant (comment ?) selon les recommandations des projets correspondants.

Quadriques non dégénérées en dimension 3. De gauche à droite : hyperboloïdes à une et deux nappes, ellipsoïde, paraboloïde hyperbolique, cylindre, paraboloïde elliptique et cône.
En mathématiques, et plus précisément en géométrie euclidienne, une quadrique, ou surface quadratique, est une surface de l'espace euclidien de dimension 3, lieu des points vérifiant une équation cartésienne de degré 2
- Ax2+By2+Cz2+2Dyz+2Exz+2Fxy+Gx+Hy+Iz+J=0{displaystyle Ax^{2}+By^{2}+Cz^{2}+2Dyz+2Exz+2Fxy+Gx+Hy+Iz+J=0}

les coefficients A à J étant réels, avec A, B, C, D, E, F non tous nuls.
Plus généralement, on peut considérer les quadriques dans le cadre des espaces affines, de dimension 3 ou plus. Ce sont alors des hypersurfaces, lieu d'annulation (en) d'un polynôme de degré 2. On peut également les étudier dans le cadre de la géométrie projective, qui simplifie et unifie complètement les résultats. On peut enfin prendre un autre corps de base que celui des réels.
Sommaire
1 Classification
1.1 Présentation des principales quadriques
1.2 Classification générale
1.3 Classification en géométrie affine
1.4 Classification en géométrie projective
1.5 Quadrique en dimension quelconque
2 Applications
2.1 En modélisation d'image
3 Notes et références
4 Voir aussi
Classification |
Présentation des principales quadriques |
Les quadriques non dégénérées[1] sont décrites ci-dessous à partir de leurs équations réduites dans un repère orthonormé convenable.
| L'ellipsoïde | x2a2+y2b2+z2c2−1=0{displaystyle {frac {x^{2}}{a^{2}}}+{frac {y^{2}}{b^{2}}}+{frac {z^{2}}{c^{2}}}-1=0,}  , , |  |
| L'hyperboloïde à une nappe (H1) | x2a2+y2b2−z2c2−1=0{displaystyle {frac {x^{2}}{a^{2}}}+{frac {y^{2}}{b^{2}}}-{frac {z^{2}}{c^{2}}}-1=0,}  , , | 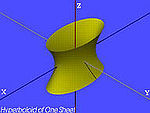 |
| L'hyperboloïde à deux nappes (H2) | x2a2+y2b2−z2c2+1=0{displaystyle {frac {x^{2}}{a^{2}}}+{frac {y^{2}}{b^{2}}}-{frac {z^{2}}{c^{2}}}+1=0,}  , , | 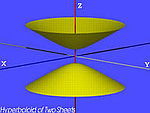 |
| Le paraboloïde elliptique (PE) | x2a2+y2b2=z{displaystyle {frac {x^{2}}{a^{2}}}+{frac {y^{2}}{b^{2}}}=z,}  , , | 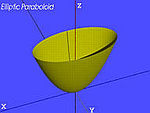 |
| Le paraboloïde hyperbolique (PH) | x2a2−y2b2=z{displaystyle {frac {x^{2}}{a^{2}}}-{frac {y^{2}}{b^{2}}}=z,}  , , | 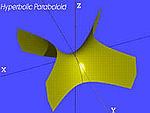 |
| Le cône à base elliptique | x2a2+y2b2−z2c2=0{displaystyle {frac {x^{2}}{a^{2}}}+{frac {y^{2}}{b^{2}}}-{frac {z^{2}}{c^{2}}}=0,}  , , | 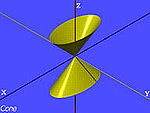 |
| Le cylindre elliptique | x2a2+y2b2−1=0{displaystyle {frac {x^{2}}{a^{2}}}+{frac {y^{2}}{b^{2}}}-1=0,}  , , |  |
| Le cylindre hyperbolique | x2a2−y2b2−1=0{displaystyle {frac {x^{2}}{a^{2}}}-{frac {y^{2}}{b^{2}}}-1=0,}  , , | 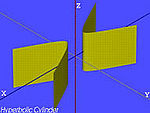 |
| Le cylindre parabolique | x2=2py{displaystyle displaystyle {x^{2}=2py}}  . . | 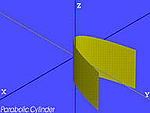 |
Classification générale |
L'équation de la surface peut s'écrire :
- Q(x,y,z)+Gx+Hy+Iz+J=0 {displaystyle Q(x,y,z)+Gx+Hy+Iz+J=0~}

où Q désigne la forme quadratique
- Q(x,y,z)=Ax2+By2+Cz2+2Dyz+2Exz+2Fxy {displaystyle Q(x,y,z)=Ax^{2}+By^{2}+Cz^{2}+2Dyz+2Exz+2Fxy~}

de matrice :
- MQ=(AFEFBDEDC){displaystyle M_{Q}={begin{pmatrix}A&F&E\F&B&D\E&D&Cend{pmatrix}}}

dont les valeurs propres sont toutes réelles puisque cette matrice est symétrique réelle.
La signature de la forme quadratique est le couple (p,q) où p est le nombre de valeurs propres strictement positives de Q et q le nombre de valeurs propres strictement négatives. Le rang de Q est alors p+q.
Par définition d'une quadrique, le rang de Q ne peut être nul.
Le fait que la signature d'une forme quadratique ne dépende pas du choix de la base choisie est démontré par la loi d'inertie de Sylvester.
Lorsque le rang est égal à 3, la quadrique admet un centre de symétrie.
| Rang | Signature | Quadrique non dégénérée | Quadrique dégénérée |
| 3 | (3,0) ou (0,3) | ellipsoïde | ∅{displaystyle varnothing }  ou point ou point |
| (2,1) ou (1,2) | hyperboloïde à 1 ou 2 nappes ou cône | ||
| 2 | (2,0) ou (0,2) | paraboloïde elliptique ou cylindre elliptique | ∅{displaystyle varnothing } ou droite |
| (1,1) | paraboloïde hyperbolique ou cylindre hyperbolique | réunion de deux plans | |
| 1 | (1,0) ou (0,1) | cylindre parabolique | ∅{displaystyle varnothing } ou plan ou réunion de deux plans |











Classification en géométrie affine |
Classification en géométrie projective |
Quadrique en dimension quelconque |
Plus généralement, dans un espace de dimension D, si les coordonnées de l'espace sont {x1,x2,…,xD}{displaystyle {x_{1},x_{2},dots ,x_{D}}}
- ∑i,j=1DQi,jxixj+∑i=1DPixi+R=0{displaystyle sum _{i,j=1}^{D}Q_{i,j}x_{i}x_{j}+sum _{i=1}^{D}P_{i}x_{i}+R=0}

pour un choix spécifique de Q, P et R.
L'équation normalisée pour une quadrique non dégénérée centrée à l'origine est de la forme :
- ∑i=1D±xi2ai2=1{displaystyle sum _{i=1}^{D}pm {x_{i}^{2} over a_{i}^{2}}=1}

Applications |
En modélisation d'image |
Pour une surface d'équation z=f(x,y) {displaystyle z=f(x,y)~}
p(x−a)+q(y−b)+12[r(x−a)2+2s(x−a)(y−b)+t(y−b)2]{displaystyle p(x-a)+q(y-b)+{frac {1}{2}}[r(x-a)^{2}+2s(x-a)(y-b)+t(y-b)^{2}]}
![<br />
p (x-a) <br />
+ q (y-b) <br />
+ frac{1}{2} [r (x-a)^2 + 2 s (x-a)(y-b) + t (y-b)^2 ]](https://wikimedia.org/api/rest_v1/media/math/render/svg/e6fa46f3427e0c45e4349d6da51aab8172207895)
avec les notations dites de Monge
p=∂f∂x(a,b),q=∂f∂y(a,b),r=∂2f∂x2(a,b),t=∂2f∂y2(a,b),s=∂2f∂x∂y(a,b).{displaystyle p={frac {partial f}{partial x}}(a,b),q={frac {partial f}{partial y}}(a,b),r={frac {partial ^{2}f}{partial x^{2}}}(a,b),t={frac {partial ^{2}f}{partial y^{2}}}(a,b),s={frac {partial ^{2}f}{partial xpartial y}}(a,b).}

Cette approximation locale est exploitée en modélisation d'images[2], où elle fournit des résultats intéressants[3].
Notes et références |
Ni vides, ni réduites à un point, une droite, un plan ou l'union de deux plans.
Sylvie Philipp, Modélisation structurale de la texture. Extraction du grain primaire et de sa règle de placement dans Douzième colloque Gretsi, Juan-les-Pins, 1988, Lire en ligne, p. 590.
Alaa Mustafa, Contribution à l'étude des courbures discrètes et de leurs applications, 2008 [Thèse].
Voir aussi |
.mw-parser-output .autres-projets ul{margin:0;padding:0}.mw-parser-output .autres-projets li{list-style-type:none;list-style-image:none;margin:0.2em 0;text-indent:0;padding-left:24px;min-height:20px;text-align:left}.mw-parser-output .autres-projets .titre{text-align:center;margin:0.2em 0}.mw-parser-output .autres-projets li a{font-style:italic}
- Conique
 Portail de la géométrie
Portail de la géométrie


